Modellare i robot in Visual Components: dalla geometria alla simulazione realistica
Data la crescente complessità dei sistemi produttivi, la modellazione dei robot industriali in ambienti virtuali è ormai una tecnologia imprescindibile. Ma cosa significa davvero “modellare un robot” in un software di simulazione 3D come Visual Components? Quali dati e comportamenti servono per replicare fedelmente il funzionamento di un robot nel suo contesto operativo?
In questo articolo esploriamo i passaggi chiave, i dati necessari e le sfide tecniche che i nostri project engineer affrontano quotidianamente per creare modelli robotici realistici, pronti per la simulazione del ciclo produttivo, il commissioning virtuale e la programmazione offline (OLP).

I dati necessari a modellare i robot: geometrie e cinematica
La base per ogni modello robotico è costituita da due blocchi informativi fondamentali: i dati CAD 3D e le informazioni sui cinematismi.
Dati CAD 3D, come file STEP o IGES, per rappresentare la geometria fisica del robot. Questi dati sono spesso reperiti presso i produttori, i loro partner commerciali o direttamente dai clienti*.
Le informazioni cinematiche, ovvero tutte quelle specifiche che descrivono le movimentazioni meccaniche del robot: giunti, limiti, velocità, orientamenti. Questi dati sono generalmente forniti in schede tecniche dei produttori e descrivono il comportamento dinamico dei robot.
Ottenere entrambi questi insiemi di dati non è sempre semplice. Se da un lato la cinematica è spesso ben documentata, dall’altro le geometrie 3D possono risultare difficili da gestire in alcuni software a causa di formati non supportati o limitata interoperabilità. Con Visual Components, invece, la grande compatibilità con i principali formati CAD consente di integrare i modelli geometrici in modo fluido e affidabile.
📎 *Compatibilità CAD in Visual Components
Visual Components supporta una vasta gamma di formati CAD 3D, facilitando l’integrazione di componenti esistenti nei progetti di simulazione.
Scopri tutti i formati supportati → Clicca Qui

I dettagli che fanno la differenza
Per passare da un modello statico a un robot simulabile, serve molto più che una forma e qualche parametro. Infatti, occorre ricostruire fedelmente:
- la posizione di riferimento “zero”: differente dal generico “home” del produttore, è il punto da cui parte la simulazione.
- l’origine del robot, che varia tra produttori come KUKA (pavimento) e Fanuc (parte centrale del corpo macchina).
- le direzioni e convenzioni degli assi, non sempre standardizzate tra produttori, ma fondamentali per un corretto posizionamento nello spazio.
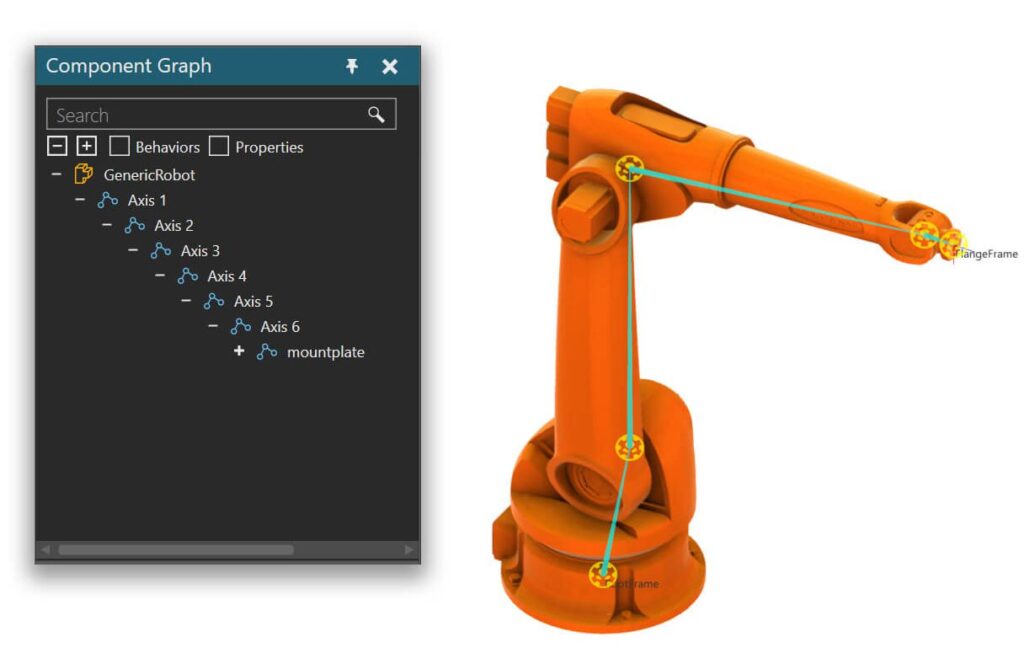
- i nomi dei giunti e la configurazione cinematica (anche tramite parametri Denavit-Hartenberg, quando disponibili).
- la stima delle accelerazioni dei giunti, spesso assente nei datasheet, ma ricostruibile tramite conoscenza tecnica e parametri noti.
Allineare le origini: interoperabilità e programmazione

Un passaggio fondamentale è l’allineamento tra l’origine del modello fornita dal produttore e quella del sistema Visual Components. Il software utilizza una origine universale, con asse Z rivolto verso l’alto dal pavimento, per garantire coerenza tra i modelli e intercambiabilità nei layout. Tuttavia, la origine nativa del produttore viene preservata, così da mantenere l’accuratezza nella programmazione e nel download su robot reali.
Comportamenti e validazione
Una volta definiti geometria e cinematica, i nostri ingegneri inseriscono nel modello i comportamenti intelligenti:
- Cinematica: per definire i movimenti del robot.
- Robot controller: un planner di movimento proprietario che emula i comportamenti reali.
- Interfacce: per garantire l’interoperabilità secondo lo standard plug-and-play, il tracking con tool di fine braccio e il montaggio su basi.
La validazione avviene tramite test interni e, quando possibile, direttamente con il cliente o il produttore. Si verifica che il programma creato nel software possa essere scaricato nel controller del robot reale e eseguito fedelmente.
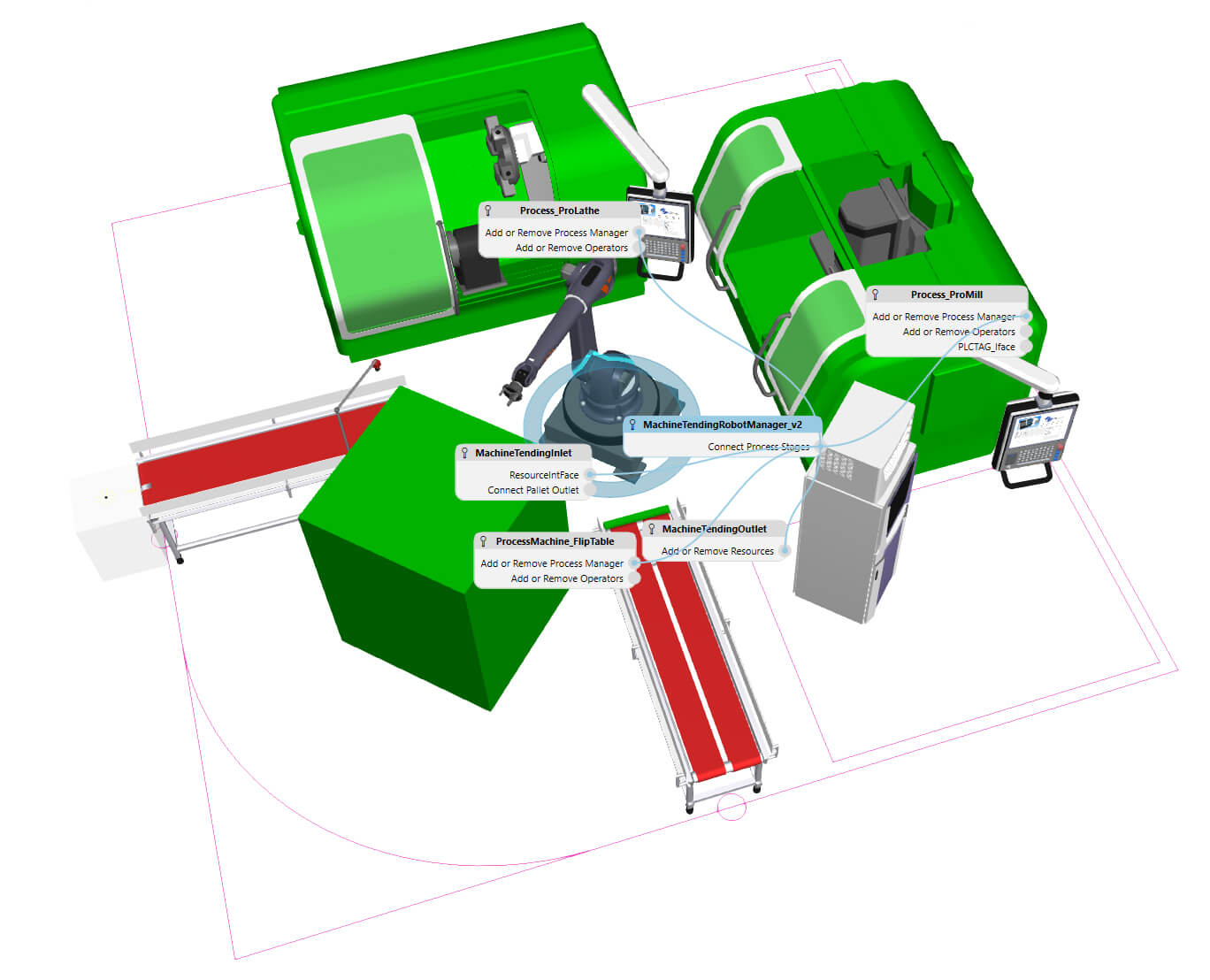
Perché scegliere Visual Components per simulare robot industriali?
Visual Components offre una libreria di oltre 3.600 componenti, tra i quali 2.137 modelli robotici pronti all’uso. I suoi strumenti permettono una modellazione rapida e accurata, grazie a motion planner generici e interfacce modulari, ideali per progetti di automazione, robotica collaborativa, saldatura robotizzata, fino alla programmazione offline.
Affidarsi a Flexcon per la modellazione dei robot – e per imparare a modellare in autonomia
Grazie a Visual Components, Flexcon non solo sviluppa modelli robotici avanzati e customizzati, validati per progetti di gemello digitale e virtual commissioning, ma mette anche a disposizione dei professionisti un percorso di formazione tecnica certificata.
Tra i corsi avanzati offerti, Visual Components Modeling è il programma ideale per imparare a creare componenti personalizzati a partire da dati CAD, definire comportamenti complessi e integrare script Python e fisica. Il corso include anche una sessione dedicata alla connessione con PLC tramite OPC-UA, ed è pensato per chi ha già completato il corso base “Essentials”.
👉 Tutti i dettagli del corso Visual Components Modeling
Contatta Flexcon: richiedi una demo gratuita e personalizzata di Visual Components.